Remote Sensing with Drones and AI for Landmine DetectionThe ongoing conflict in Ukraine highlights the dire need for efficient and safe landmine detection methods. This research explores the use of drones equipped with RGB cameras, multispectral sensors, and ground penetration radar (GPR) to detect landmines. Custom datasets were created using 3D-printed and simulated mines to train machine learning models, particularly YOLO v5 and convolutional autoencoders. While the RGB-based approach showed promise for surface mines, GPR remains essential for buried mines. Additionally, a novel probing technique using simulated robotics in MuJoCo is introduced to enhance subsurface detection. The integration of advanced imaging, AI, and robotic simulations holds transformative potential for landmine detection, improving safety, accuracy, and scalability. This study evaluates the effectiveness of individual technologies and proposes a comprehensive framework for future advancements. 1. IntroductionLandmines pose significant threats long after conflicts end, causing injuries, fatalities, and hindering the use of land for agriculture and development. These hidden dangers necessitate innovative solutions for detection and removal. Traditional detection methods, such as manual searches and metal detectors, face critical limitations, particularly with non-metallic mines. This research explores a modern approach combining drones equipped with advanced sensors, artificial intelligence, and robotic simulations to detect landmines efficiently and safely. Drones offer unique advantages, such as their ability to access hazardous areas without risking human lives, and their adaptability to various terrains and operational conditions. This study specifically focuses on four methodologies: RGB imaging, multispectral sensors, GPR, and robotic probing simulation, each offering distinct capabilities and challenges. 2. Related WorkAdvancements in drone technology and machine learning have catalyzed significant progress in landmine detection. Multispectral imaging, coupled with CNNs, has demonstrated high accuracy in surface-level mine detection. For example, studies leveraging YOLO-based architectures have achieved real-time detection capabilities for small objects, while other research highlights the potential of GPR in locating buried mines using anomaly detection frameworks. Probing techniques using robotic systems are a newer addition, leveraging sensors and machine learning to enhance subsurface detection. This study builds upon prior work by integrating multiple sensing techniques and robotic simulations, enhancing the robustness and applicability of the detection system. 3. Methodology3.1 Data AcquisitionTo ensure realistic testing conditions, simulated mines, including TM-62, PFM-1, OZM, and PMN-2 types, were constructed using 3D printing and materials mimicking real mines' physical and dielectric properties. These replicas were strategically deployed in controlled environments, such as open fields and vegetated areas, to simulate various scenarios. Data collection was conducted using DJI Mavic 2 Pro and Parrot Bluegrass drones, capturing imagery at multiple altitudes (e.g., 10m, 20m, and 50m) and under varying lighting and weather conditions to create a comprehensive dataset. 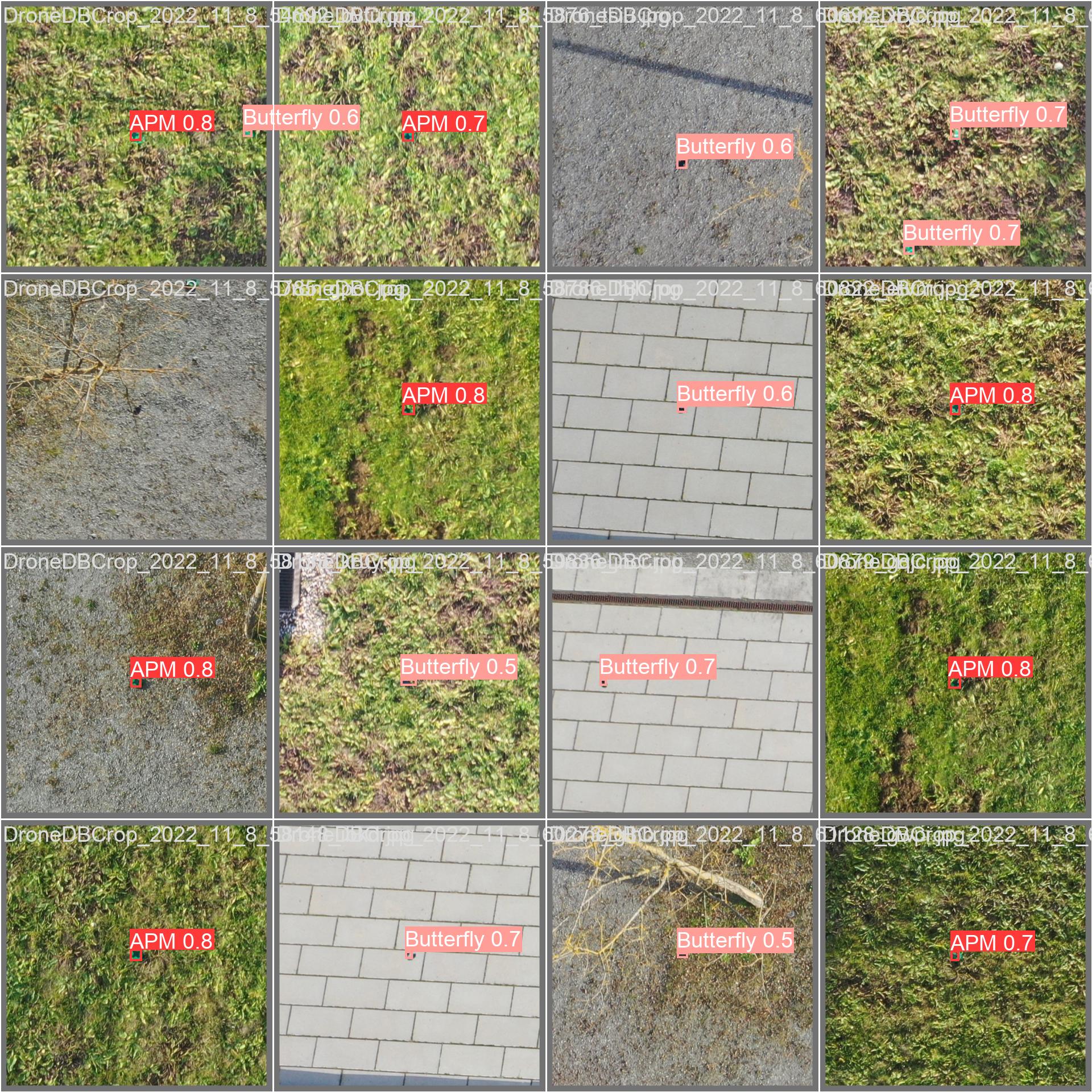
Figure 1: Example of RGB-labeled mine detection dataset. 3.2 Sensor ModalitiesRGB Imaging: RGB cameras provided high-resolution images, ideal for surface-level mine detection. Captured data was annotated using Label Studio, a flexible labeling tool, and the YOLO v5 model was trained for object detection. The decision to use YOLO v5 stemmed from its fast inference time and superior performance on small object detection. Multispectral Imaging: Multispectral sensors captured data across various wavelengths, revealing details not visible in standard RGB images, such as subtle vegetation disturbances caused by buried mines. Processing these images required optimizing the spectral channel selection to maximize detection accuracy. 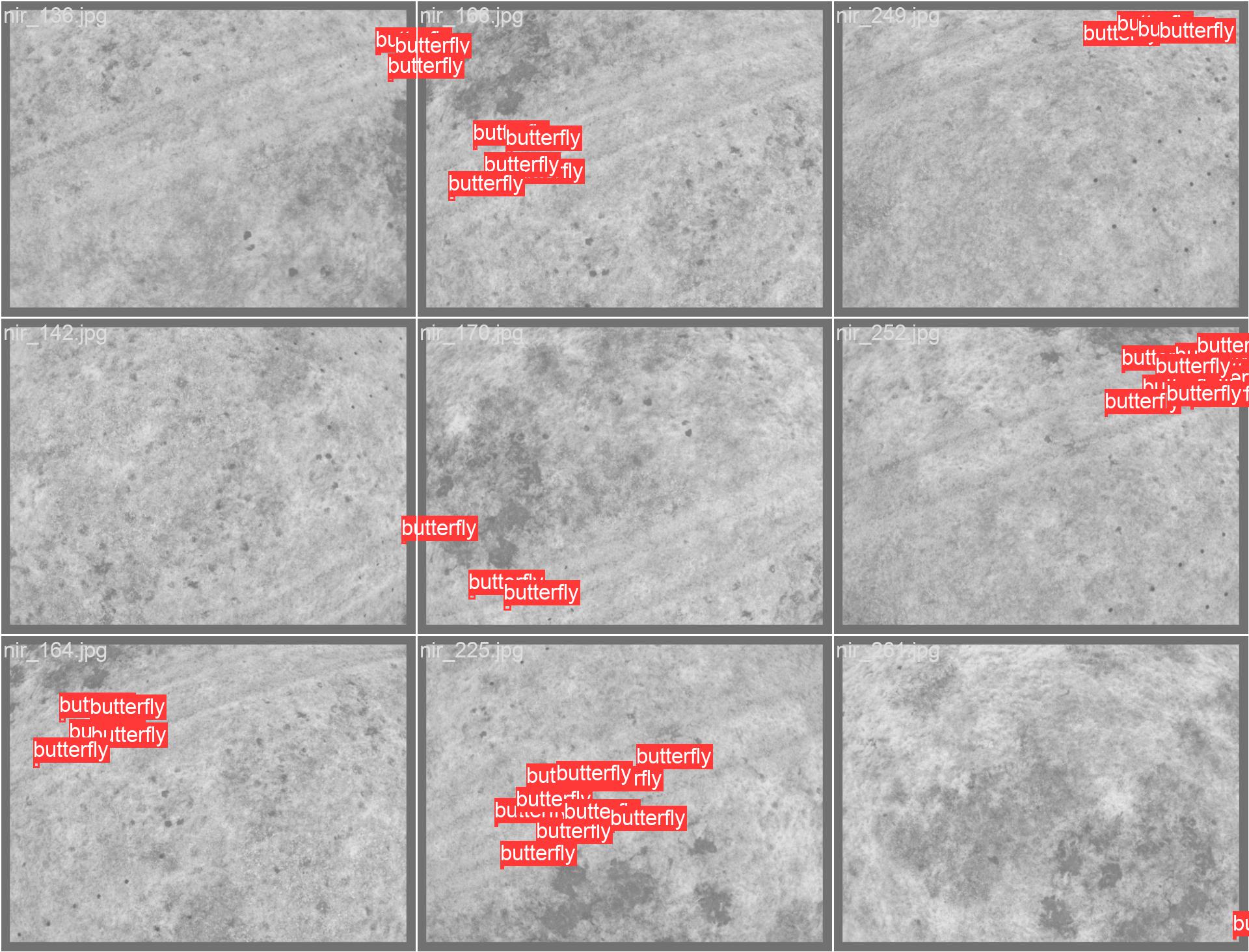
Figure 2: Multispectral images with overlaid labels for detected mines. 4. Results4.1 RGB ImagingThe YOLO v5 model achieved notable success, with a precision-recall curve indicating robust detection of anti-personnel mines. Despite its effectiveness, the model's accuracy diminished for smaller or partially obscured mines, underscoring the need for dataset expansion and diversity. The RGB-based approach proved cost-effective and relatively easy to implement, relying solely on commercially available drones and cameras. 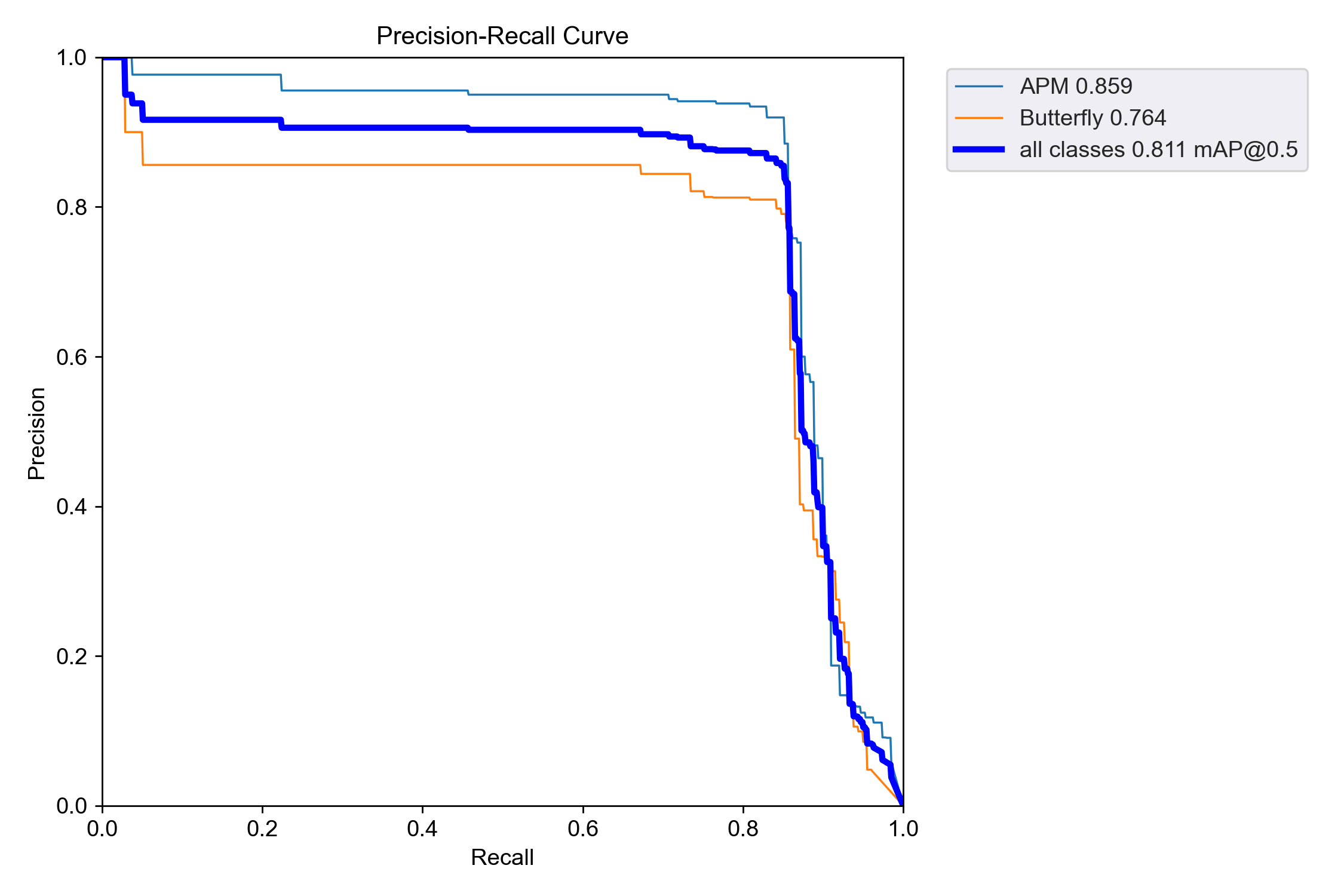
Figure 5: Precision-Recall curve for YOLO v5 model. 5. DiscussionThe RGB-based approach is cost-effective and well-suited for detecting surface-level mines but is inherently limited by its dependence on visible features. Multispectral imaging offers a broader detection spectrum but requires significant optimization in both hardware and software. GPR provides unparalleled capabilities for buried mine detection, though it necessitates further refinement to handle complex subsurface environments. The robotic probing simulation introduces a promising new dimension, allowing for safe and scalable subsurface detection through simulated environments. 6. Conclusion and Future WorkThis study underscores the transformative potential of drones, AI, and robotic simulations in landmine detection. By integrating RGB, multispectral, GPR, and probing technologies, this approach offers a comprehensive solution to a critical global issue. Future work should focus on:
Probing Simulation for Automated Landmine DetectionProbing, a method traditionally performed manually by deminers, has been recognized as a reliable but highly dangerous technique for landmine detection. This section explores the automated probing simulation developed using MuJoCo, aiming to enhance safety and efficiency. By leveraging robotic systems equipped with linear actuators, force sensors, and advanced simulation software, this approach seeks to replicate and improve upon traditional methods, reducing the inherent risks to human operators. Overview of Probing MethodologyProbing involves the careful insertion of a rod into the ground to detect subsurface objects based on resistance feedback. Manual probing requires significant physical effort, concentration, and skill, as even slight miscalculations can lead to triggering explosive devices. The automated probing system replicates this process by using a robotic setup simulated in MuJoCo, a physics-based simulation platform, allowing for detailed experimentation and optimization in a controlled virtual environment. Simulation Framework in MuJoCoMuJoCo (Multi-Joint dynamics with Contact) was utilized to design and simulate the probing system. This software provides robust tools for modeling physical interactions, making it ideal for replicating the complex dynamics of probing. Key components of the simulated system include:
Figure 1: MuJoCo simulation of the automated probing system, including actuator and test bed. Artificial Dataset GenerationTo validate the simulation and facilitate training for machine learning models, an artificial dataset was generated. This dataset includes positional data of the probe and corresponding force measurements. The dataset structure is as follows:
The data was visualized as a point cloud to represent the probing process and identify anomalies consistent with buried landmines. 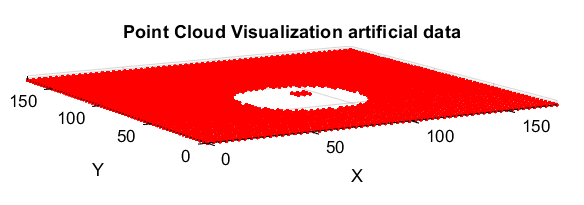
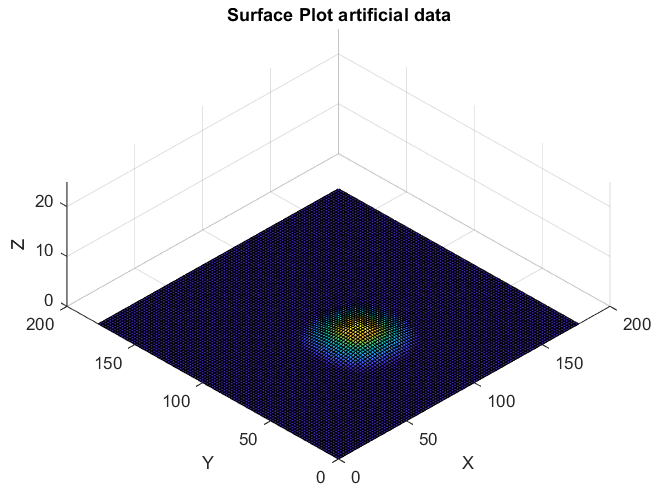
Figure 2: Scatter plot (left) and surface plot (right) of artificially generated probing data, highlighting resistance spikes indicative of buried objects. Robotic Model DesignThe robotic probing system was modeled in Fusion 360 before being integrated into the MuJoCo simulation. The system comprises the following components:
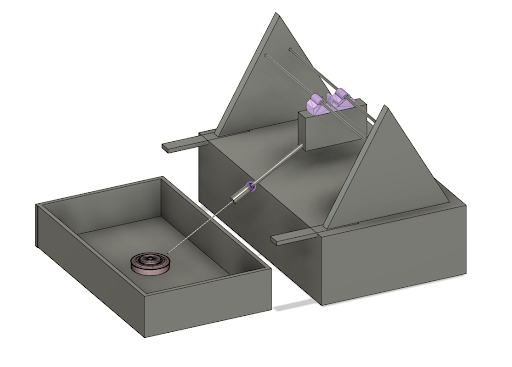
Figure 3: 3D model of the automated probing system, including the test bed and robotic probing arm. Simulation Mechanics and ParametersThe simulation was configured to closely replicate real-world probing scenarios. Key parameters included:
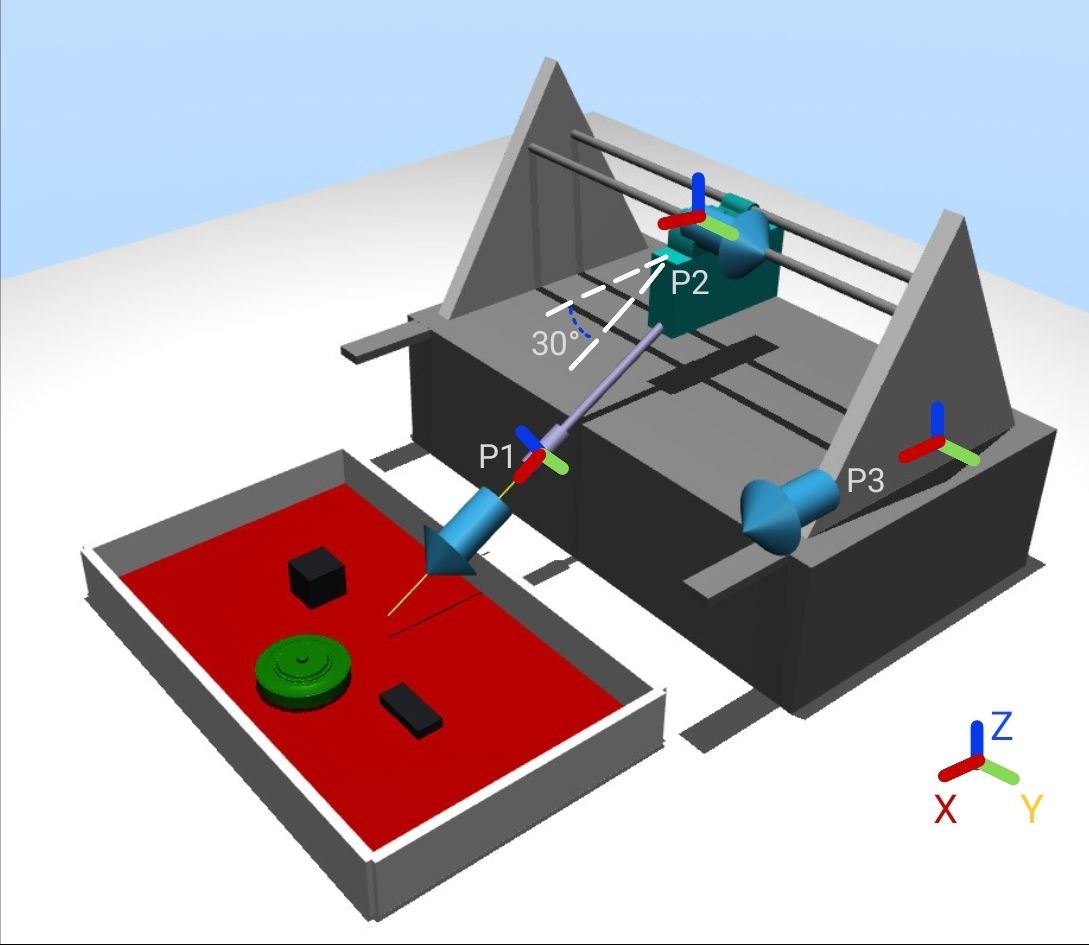
Figure 4: MuJoCo simulation showing probing arm in action with depth and resistance data overlay. Results and VisualizationThe simulation generated detailed datasets capturing the depth and force measurements across the test bed. The results were analyzed to evaluate the system's ability to differentiate between normal soil and buried objects. Key findings include:
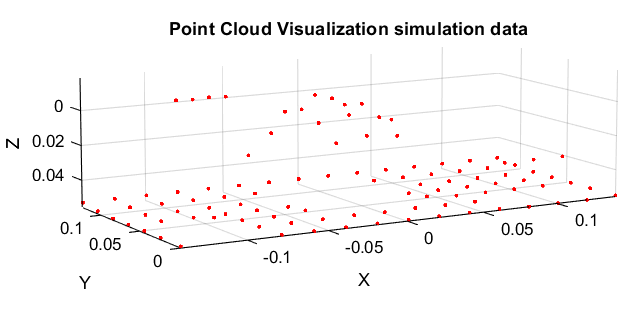
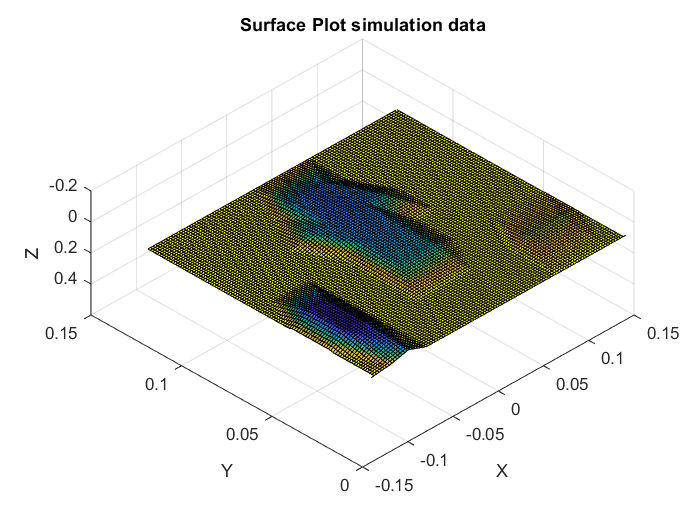
Figure 5: Point cloud (left) and surface plot (right) highlighting anomalies corresponding to buried objects. Forward Kinematics for Probing SystemForward kinematics was employed to calculate the position of the probing tip within the test bed, ensuring comprehensive coverage. The TTT (Translation-Translation-Translation) robot configuration allowed for precise control over the probing process. The kinematic equations are as follows: 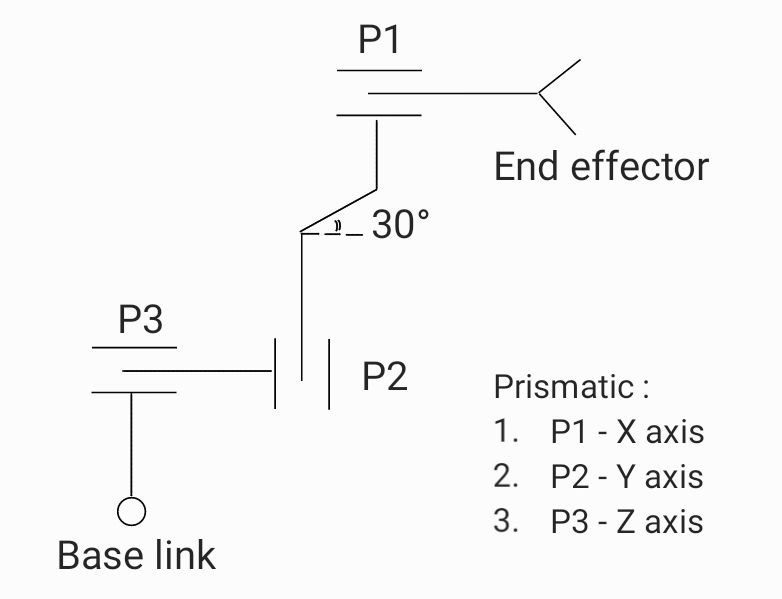
Figure 6: Kinematic representation of the TTT probing robot with a 30° probing angle. DiscussionThe simulation demonstrated the feasibility of automated probing for landmine detection. By integrating precise motion control, force measurement, and realistic soil modeling, the system effectively identified subsurface anomalies. While promising, the system's current limitations include the absence of environmental noise and the simplified soil composition in the test bed. Future iterations will incorporate these factors to bridge the gap between simulation and real-world deployment. These efforts will pave the way for scalable, efficient, and safe landmine detection systems, reducing human risk and enabling the reclamation of affected lands. Ground Penetrating Radar (GPR) for Landmine DetectionGround Penetrating Radar (GPR) is a geophysical method used for subsurface exploration, providing non-invasive imaging of underground structures. This technology has proven invaluable for applications such as archaeology, construction, and landmine detection. In the context of humanitarian demining, GPR offers a safe and effective alternative to traditional methods, enabling the identification of buried landmines without direct contact. IntroductionThis article focuses on the utilization of GPR for landmine detection, detailing the tools, methodologies, challenges, and solutions developed during a recent study employing the UgCS GeoHammer v.1.1.7 program in conjunction with the COBRA CBD ground radar system. GPR Technology OverviewGPR operates by transmitting high-frequency electromagnetic waves into the ground and analyzing the reflected signals from subsurface structures. Key features include:
Experimental SetupEquipmentThe study utilized the following equipment:
Initial FlightThe first flight was conducted in an open area with minimal vegetation. Mines were buried a day prior to the experiment, and their positions were marked with stickers. A simple map of the buried mines was created for validation purposes. The drone flew at a height of approximately 10 meters, collecting radar data across a grid pattern. 
Figure 1: Drone equipped with COBRA CBD ground radar system. Data AnalysisUgCS GeoHammer InterfaceUgCS GeoHammer v.1.1.7 was used to process the radar data. The software provides a user-friendly interface for:
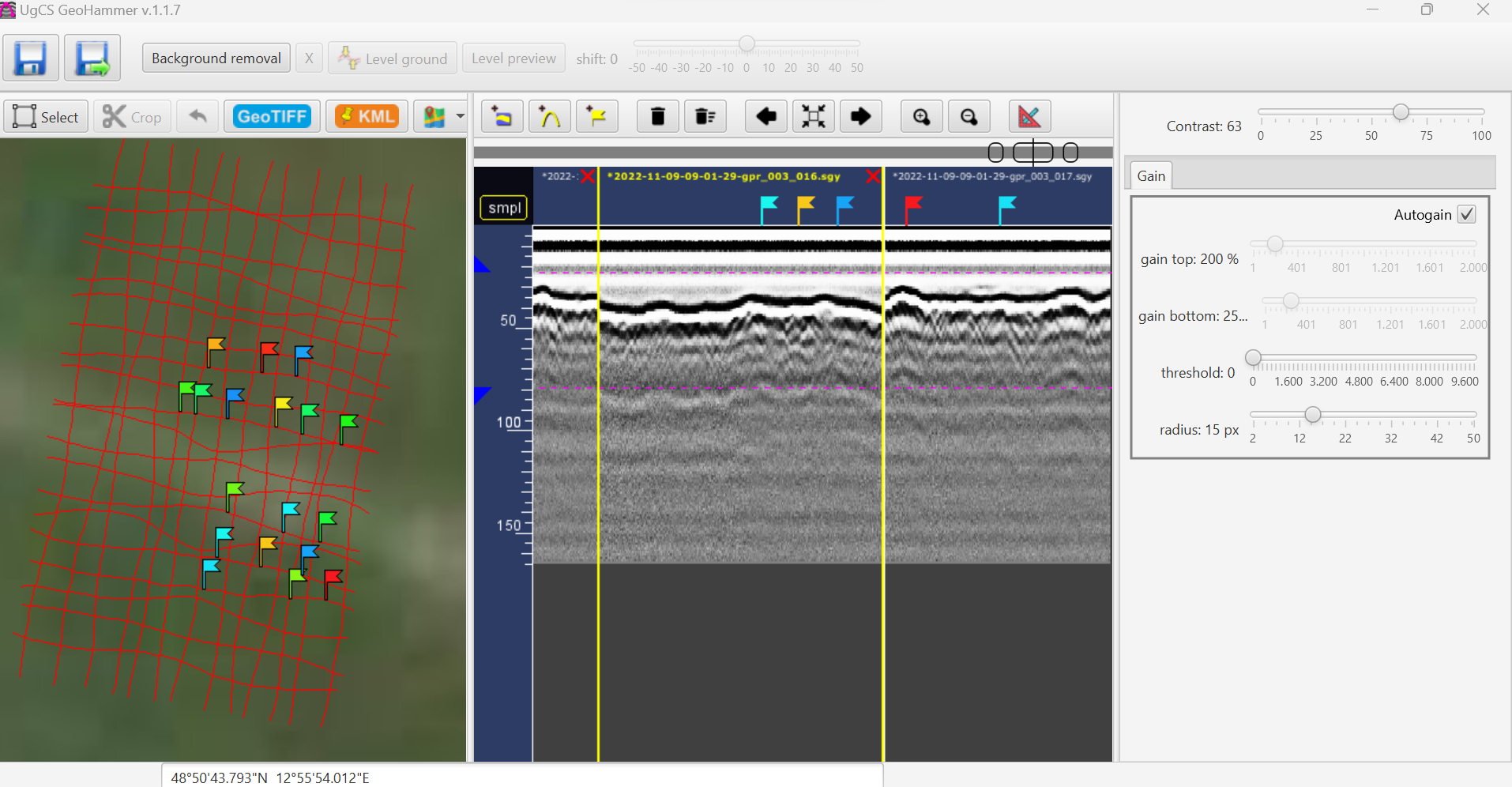
Figure 3: UgCS GeoHammer interface displaying radargram of initial flight. ObservationsThe radargrams from the first flight revealed several challenges:
Addressing ChallengesTo improve data accuracy, a second flight was conducted under modified conditions:
Improved ResultsThe inclusion of visible surface markers enhanced the alignment of radar data, making subsurface anomalies more distinguishable. The refined radargrams demonstrated:
Results and InsightsThe analysis of GPR data confirmed its potential for landmine detection. Key findings include:
DiscussionThe study highlighted the strengths and limitations of GPR in landmine detection. While the technology offers significant safety and efficiency advantages, challenges remain in optimizing data clarity and reducing environmental noise. Future improvements may include advanced preprocessing techniques and integration with machine learning models for automated anomaly detection. ConclusionGround Penetrating Radar, combined with drone technology and advanced data processing tools like UgCS GeoHammer, represents a promising solution for landmine detection. By addressing current challenges and refining methodologies, this approach can significantly enhance the safety and effectiveness of demining efforts, contributing to global humanitarian goals. |