NVIDIA Jetbot Gesture RecognitionThe Jetbot is an open-source robot platform powered by the NVIDIA Jetson Nano. This project focuses on enabling the Jetbot to recognize gestures and respond with corresponding actions, combining cutting-edge machine learning and robotics techniques. Project OverviewThe goal of this project was to implement a scalable gesture recognition system that allows the Jetbot to classify specific hand gestures and execute predefined actions. Additional functionalities such as collision avoidance and object tracking were integrated for robust real-world operation. A detailed presentation can be found here. Project Features
Implementation Process
Key FunctionalitiesCollision AvoidanceCollision avoidance was achieved by training a ResNet-based model on a dataset of obstacles and clear paths. Data augmentation techniques such as flips, zooms, and contrast adjustments increased robustness, allowing the Jetbot to navigate safely in dynamic environments. 
Gestures RecognitionThe robot was trained to recognize gestures such as "Go Right" and "Go in Circles." When these gestures are detected, the Jetbot executes corresponding actions. Go Right Gesture
Go Circles Gesture
TurtleBot Maze SolverThe TurtleBot is a ROS-based mobile robot. This project aimed to create a robust solution for navigating mazes using ROS2, laser distance sensors (LDS), odometry, and efficient navigation algorithms. Project Overview
Figure 1: Initial 2x2 maze solving (left) and more advanced methods in 3x3 maze (right). Setup GuideThis report provides a comprehensive walkthrough for setting up the environment necessary to execute the TurtleBot maze environments. It includes instructions for both simulation and real-world scenarios, ensuring that we have all the required dependencies and configurations in place. Getting Started1. Prerequisites
2. Install Docker and Prepare Volume
Setting Up the Docker ContainerThe provided Docker container is pre-configured with all necessary dependencies. To run the container:
Setting Up the ROS Environment
Running the Challenges1. Challenge ExecutionExecute the desired challenge by running the corresponding Python script. For example:
2. Adjusting Goals for Larger Mazes
For larger mazes, manually configure the Troubleshooting and Tips
Continuous Integration and Deployment (CI/CD)For deployment we used CI/CD tools like GitLab pipelines. The provided Docker container is compatible with GitLab CI/CD configurations for seamless integration. Project ChallengesThe project was divided into several progressively challenging tasks: Challenge 1: Laser Distance Sensor (LDS)The primary goal was to calculate the minimum distance to walls using the LDS. The noisy sensor data was mitigated using averaging techniques. This step established the foundation for wall detection and proximity sensing. Code snippet for processing LDS data:
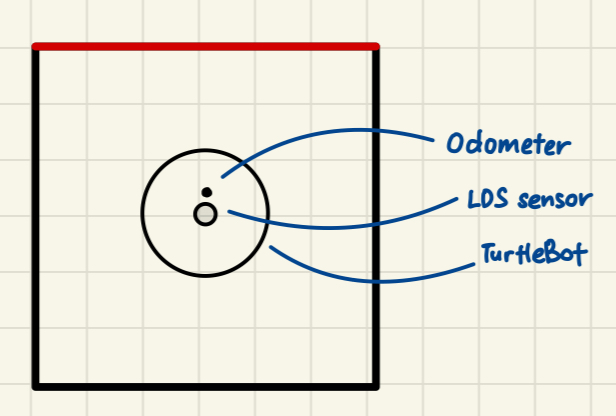
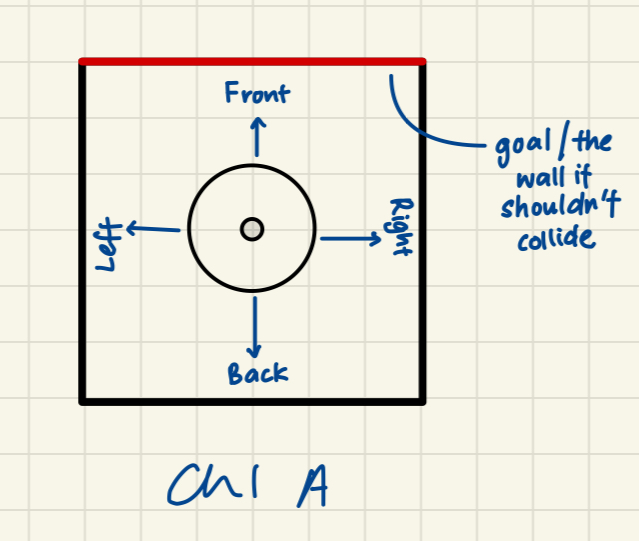
Figure 1: Initial objects in the scene (left) and goal description (right) for the first steps. Velocity ControlBuilding upon the foundation laid previously, we choose the 1 x 1 meter maze setting. The principal task in this challenge was to navigate the robot to a wall without collision. Furthermore, additional requirements necessitated the implementation of smooth acceleration and deceleration to facilitate seamless motion control. We implemented the subscription to the LIDAR sensors data and the publisher to change the Velocity of the robot's wheels. Using this, it was simple to write a program that checked the distance to the front wall and calculated its speed based on this distance. If the distance was greater than 0.3m, it would accelerate and then decelerate as soon as it crossed that boundary. We made sure to include a minimum speed that was reasonable, so that the robot would eventually reach its destination and not slow down to almost 0 before it got there. I also made sure to include a safety distance to the wall, as the LIDAR is around 8cm back from the front of the robot, and if you don't account for this, the robot will never stop, since the LIDAR never returns a distance of 0. Objectives
ApproachWe utilized ROS2 nodes to process sensor data and control the robot's motion. The robot was required to adjust its speed dynamically based on the distance to the obstacle, ensuring smooth acceleration and deceleration. 1. Laser Distance Sensor (LDS) Data ProcessingThe LDS provides an array of distances in a 360° sweep around the robot. For this challenge, only the distance directly in front of the robot was relevant. To handle sensor noise, multiple readings were averaged using a moving window technique, ensuring stable and accurate measurements. Code snippet for processing LDS data:
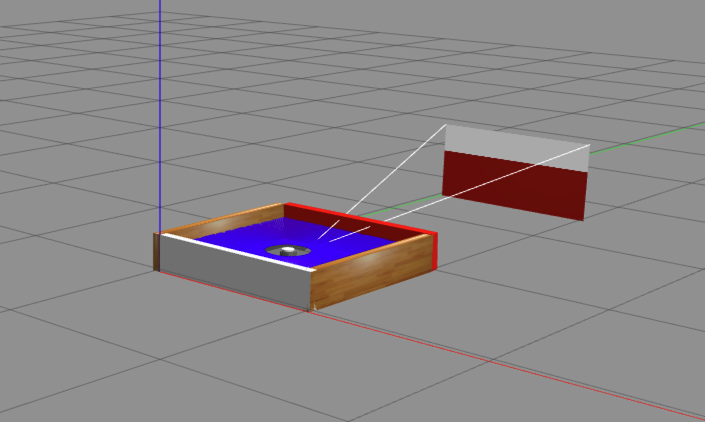
Figure 1: Screenshot from Gazebo simulator. 2. Proportional Velocity ControlA proportional controller was implemented to adjust the robot's linear velocity based on the distance to the wall. The velocity was calculated using the formula: Velocity = Proportional_Gain × (Distance - Safety_Distance) The proportional gain ensured that the velocity was directly proportional to the distance, resulting in smooth deceleration as the robot approached the wall. A minimum velocity threshold was set to prevent the robot from stalling prematurely. Code snippet for proportional control:
3. Integration with ROS2
The proportional velocity control logic was integrated into a ROS2 node, which subscribed to the 
Figure 2: ROS2 node interaction for velocity control and sensor data processing. Challenge 2: Precise RotationBuilding upon the accomplishments of Challenge 1, Challenge 2 focused on achieving precise rotational alignment. The principal objective was to enable the TurtleBot to perform an exact 90-degree counterclockwise rotation within the established maze environment. This challenge introduced the complexity of combining Laser Distance Sensor (LDS) data and odometry to ensure accuracy. Challenge 2 benefited from leveraging a foundational template that provided basic ROS2 subscriptions for sensor data and publishers for wheel velocities. Using these, a robust algorithm was developed to calculate rotational errors and control the robot's angular velocity. The process ensured that the TurtleBot aligned precisely with the desired orientation without overshooting or undershooting. Objectives
ApproachChallenge 2 required a creative combination of geometric transformations and control logic to achieve precise rotation. Data from the LDS was carefully calibrated to reflect the robot's central frame of reference, while odometry tracked incremental rotational changes. 1. LDS Data TransformationThe LDS data, originally captured in the sensor's frame, was transformed into the robot's central frame to account for the offset of the LDS. This transformation ensured accurate and reliable distance measurements relative to the axis of rotation. Code snippet for LDS-to-robot frame transformation:
2. Rotation Error CalculationThe rotational error was determined by comparing the current orientation with the target orientation. This calculation leveraged odometry data to track incremental rotational changes and normalize the error within a manageable range. Python snippet for rotation error calculation:
3. Proportional Rotation ControlA proportional controller was implemented to dynamically adjust angular velocity based on the rotation error. This approach ensured that the robot decelerated smoothly as it approached the target angle, resulting in precise alignment. Python snippet for proportional angular control:
4. Integration with ROS2The rotational control logic was encapsulated in a ROS2 node that subscribed to odometry data and published angular velocity commands to the TurtleBot. This node continuously monitored rotation error and dynamically adjusted angular velocity for precise control. Challenge 3: Sequential MovementBuilding upon the previous challenges, Challenge 3 demonstrated the TurtleBot's ability to execute a sequence of precise movements and rotations. The task required the robot to move forward 15 cm, perform an exact 90-degree rotation, and move forward another 15 cm, all while maintaining high accuracy and smooth transitions. The implementation relied on a state machine to manage sequential actions, leveraging odometry for precise tracking and control. Each action was executed with a clear target and carefully calibrated motion control, ensuring robust and repeatable performance. Objectives
ApproachThis challenge required the integration of precise motion tracking, rotational control, and sequential logic. A modular approach was adopted to separate each movement phase, enabling efficient debugging and future adaptability. 1. State Machine DesignA state machine was implemented to orchestrate the movement sequence. The robot transitioned between the following states:
2. Odometry for Accurate TrackingOdometry provided real-time feedback on the robot's position and orientation. By continuously monitoring x, y, and yaw values, the robot calculated distances traveled and angles rotated with precision. Python snippet for distance calculation using odometry:
3. Smooth Motion ControlProportional control algorithms were applied to both linear and angular velocities to ensure smooth motion. The robot gradually reduced velocity as it approached the target position or orientation, preventing abrupt stops. Python snippet for smooth velocity control:
Figure 1: Gazebo simulated velocity control. 4. Integration with ROS2The control logic was implemented in a ROS2 node that subscribed to odometry data and published velocity commands. The state machine logic ensured modularity, with each state triggering specific commands to achieve its respective goal. Challenge 4: Maze NavigationHere we marked a significant progression in the TurtleBot's capabilities, involving navigation through increasingly complex mazes. First, the robot navigated a 2x2 maze, and then we extended this to a 3x3 maze. These challenges required advanced techniques in mapping, pathfinding, and odometry correction to ensure accurate and efficient traversal of the maze environments. Objectives
ApproachThe challenges combined perception, planning, and control into a cohesive navigation framework. The robot dynamically updated its internal map, calculated optimal paths using A*, and executed precise movements to traverse the maze step-by-step. 1. Wall Detection and MappingThe LDS was used to detect and map walls around the robot dynamically. Each cell in the maze was represented as a grid, and obstacles were marked based on sensor readings. This mapping approach included:
In this task, the aim is to navigate the robot from the lower-left extremity to the upper-right extremity of a maze by leveraging data from both the odometer and the laser distance sensor. The methodology commences with the initialization of the maze dimensions, setting the starting point and the target destination within the grid.
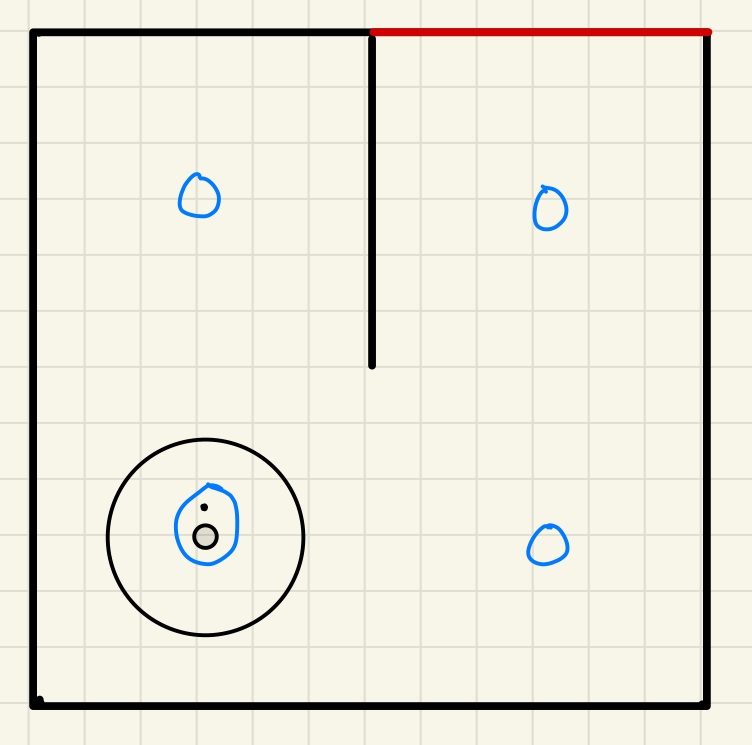
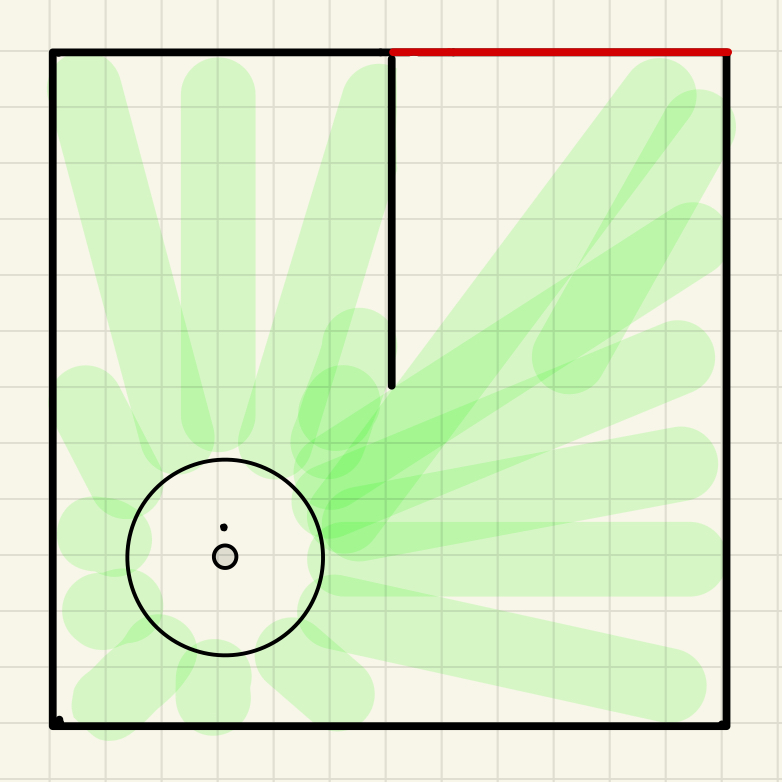
Figure 2: initialised grids in zeros (left) and the range of the LDS sensor while the robot is in its initial position (right) of a maze world in the form of 2 x 2 meters. With this setup, the robot gains awareness of its spatial context within the maze and its ultimate objective. Utilizing the laser distance sensor, the robot identifies wall locations, translating these detections from the LDS frame to the robot's frame, then to the world frame, and ultimately into grid coordinates. These transformations facilitate the subsequent updating of the maze's grid map, marking cells as occupied based on the sensor data. As the robot detects the walls, it will be consider as "1". Upon refreshing the grid map with obstacle information, the robot employs the A* search algorithm to ascertain a viable path to the target. This algorithm is designed to identify the most efficient route, avoiding occupied cells based on the updated grid information. The presence of an obstacle in a cell disqualifies it from being part of the calculated path. After the process from above then it will mark the grids that is occupied or blocked as 1 in the grid matrix. 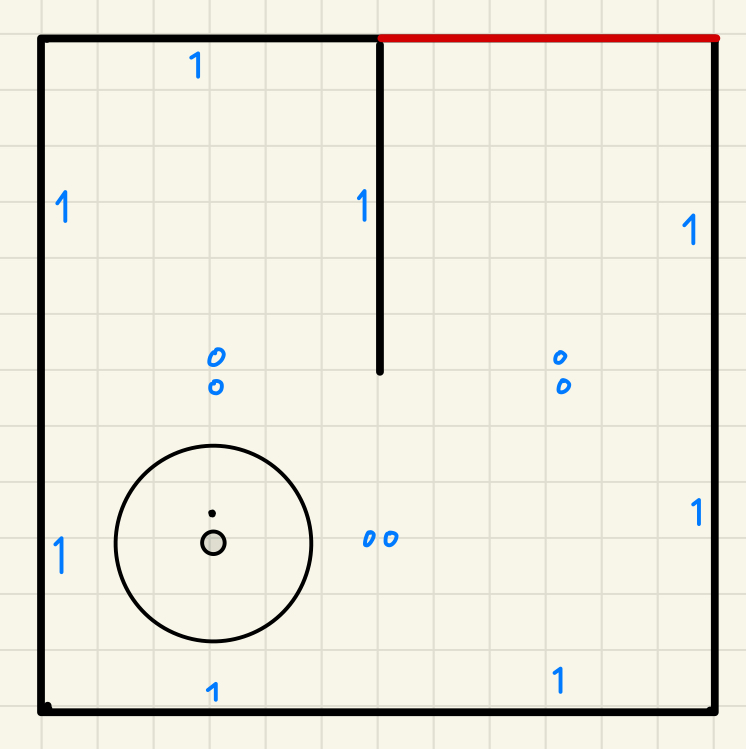
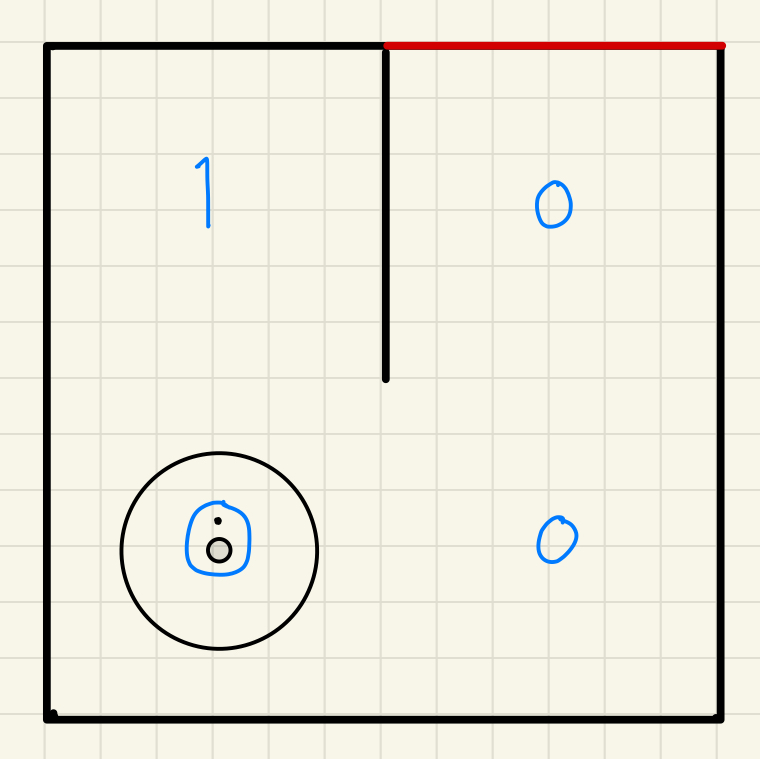
Figure 3: detecting walls in various directions (left) and identifying blocked paths in the grid (right) of a maze world in the form of 2 x 2 meters. Upon identifying a viable pathway, the robot engages its control systems to traverse the established route. This process involves utilizing data from the Laser Distance Sensor (LDS) to continuously ascertain the presence of any newly detected barriers, especially after reaching the end of the path but before arriving at the goal. Additionally, it employs odometric information to maintain awareness of its positional and orientational status. The implementation of this methodological approach is anticipated to facilitate the robot's successful navigation to the predetermined target location within the labyrinthine environment. Voila! This image show how the robot should drive towards its end goal and stop: 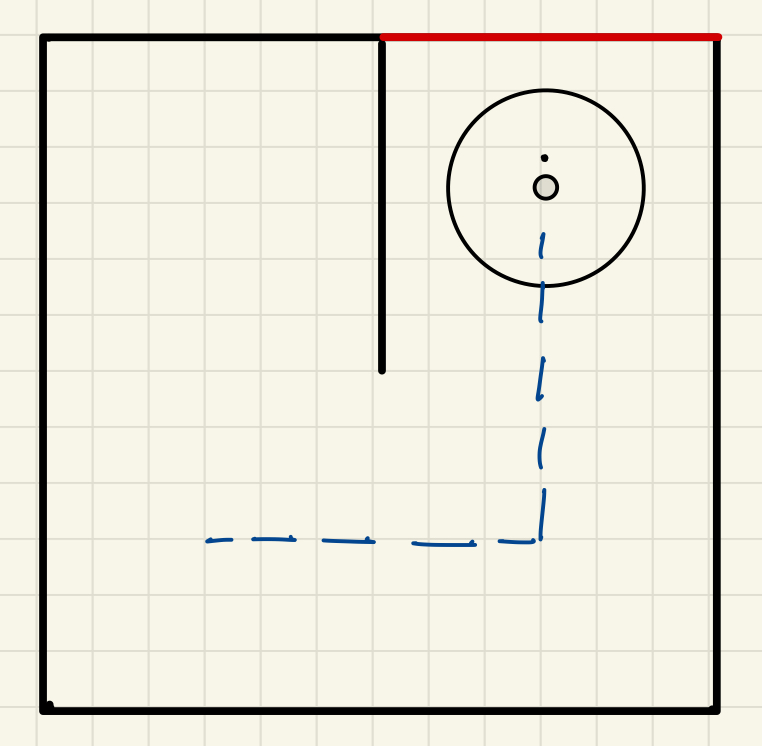
Figure 4: Predicted path in a maze world in the form of 2 x 2 meters. The second strategy for this challenge involves utilizing odometer data for the robot to ascertain its position and orientation for navigation. Concurrently, data from the laser distance sensor will be employed to detect obstacles, such as walls. Upon determining the distance between the robot and a wall that impedes its trajectory towards the goal, should the laser distance sensor register a distance less than 1.73 meters at an approximate angle of 30 degrees to the right, the robot will ascertain the presence of a wall. In such an instance, the robot will deduce that it must adopt the lower route, which entails rotating right, advancing straight, rotating left, and then proceeding straight towards its destination. Should the lower route be obstructed, the robot will then resort to the upper route, characterized by moving straight, executing a right rotation, and continuing in a straight line until it reaches its objective. This approach will only work if the world is a 2 x 2 meters maze. It is a simpler approach to solve this challenge. 2. Wall Detection and Mapping for 3x3 mazeThe figure below shows one of the 3 x 3 meters maze world with the robot finding it's path to the goal state. We use the same approach as before, as it is dynamic. The robot's LDS sensor is able to detect the wall and the range of the LDS sensor is noted in green spacing. The red marking shows the grid matrix values. The blue marking shows the where the walls are detected in each grid cell. At the end, it will drive and arrive at its goal. 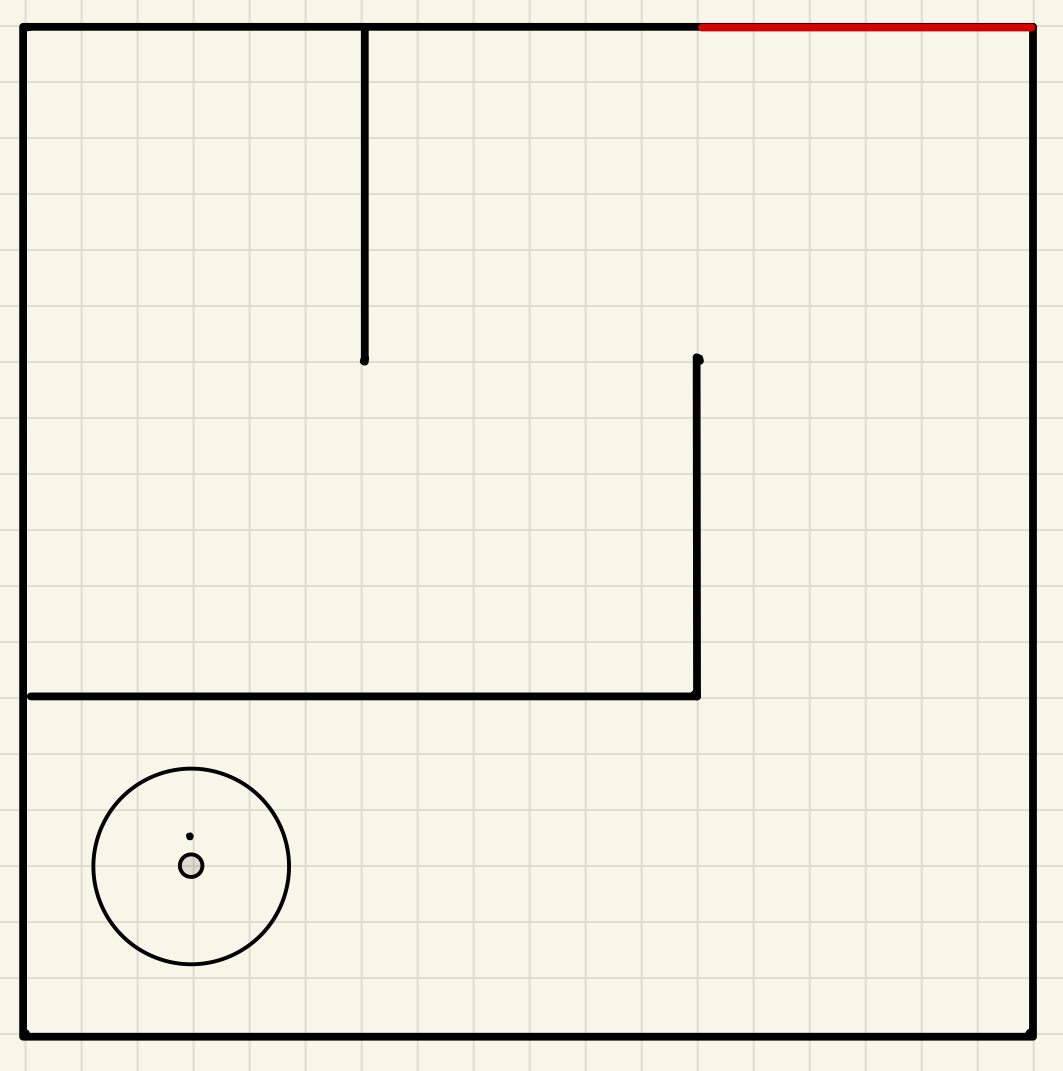
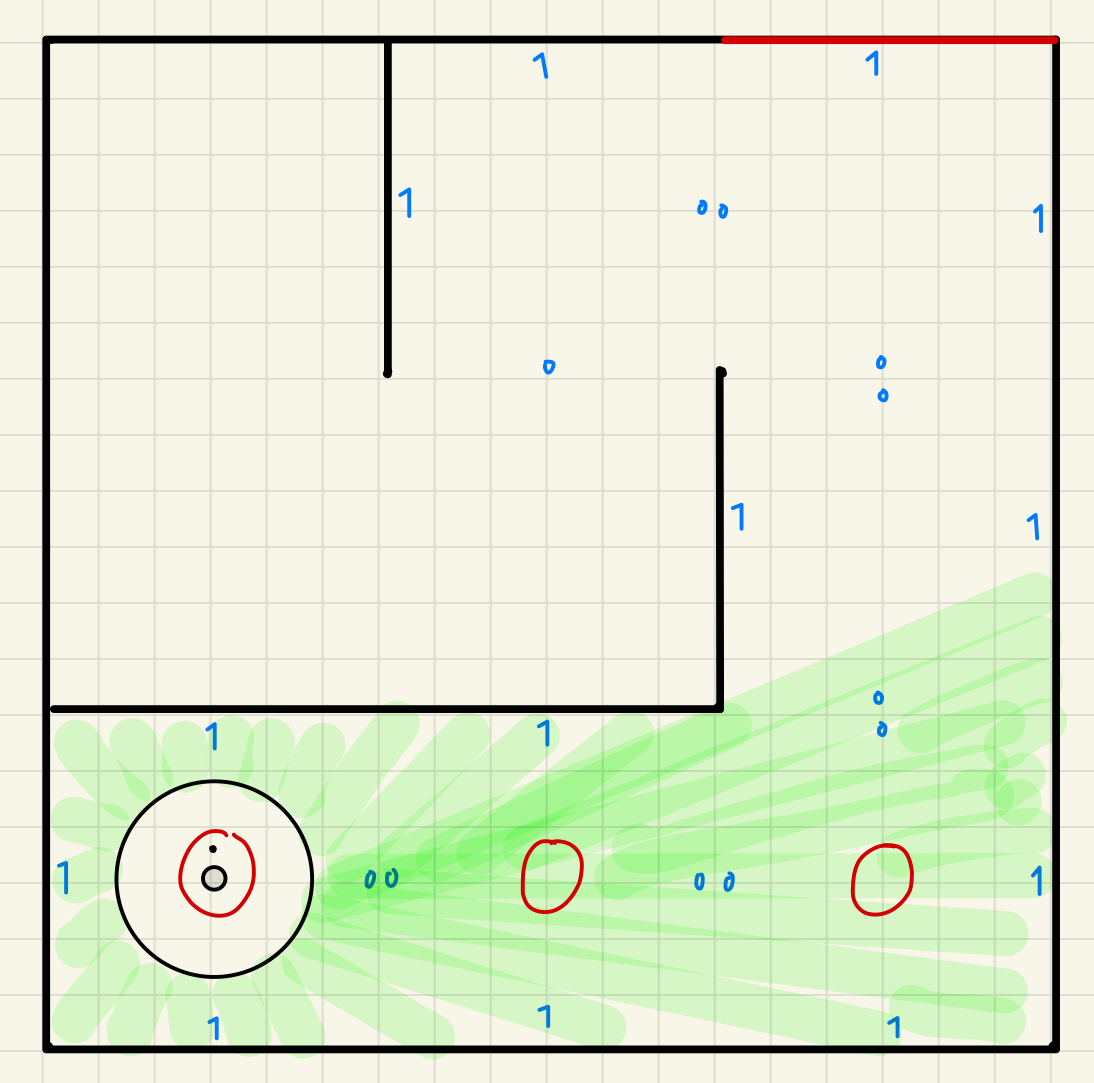
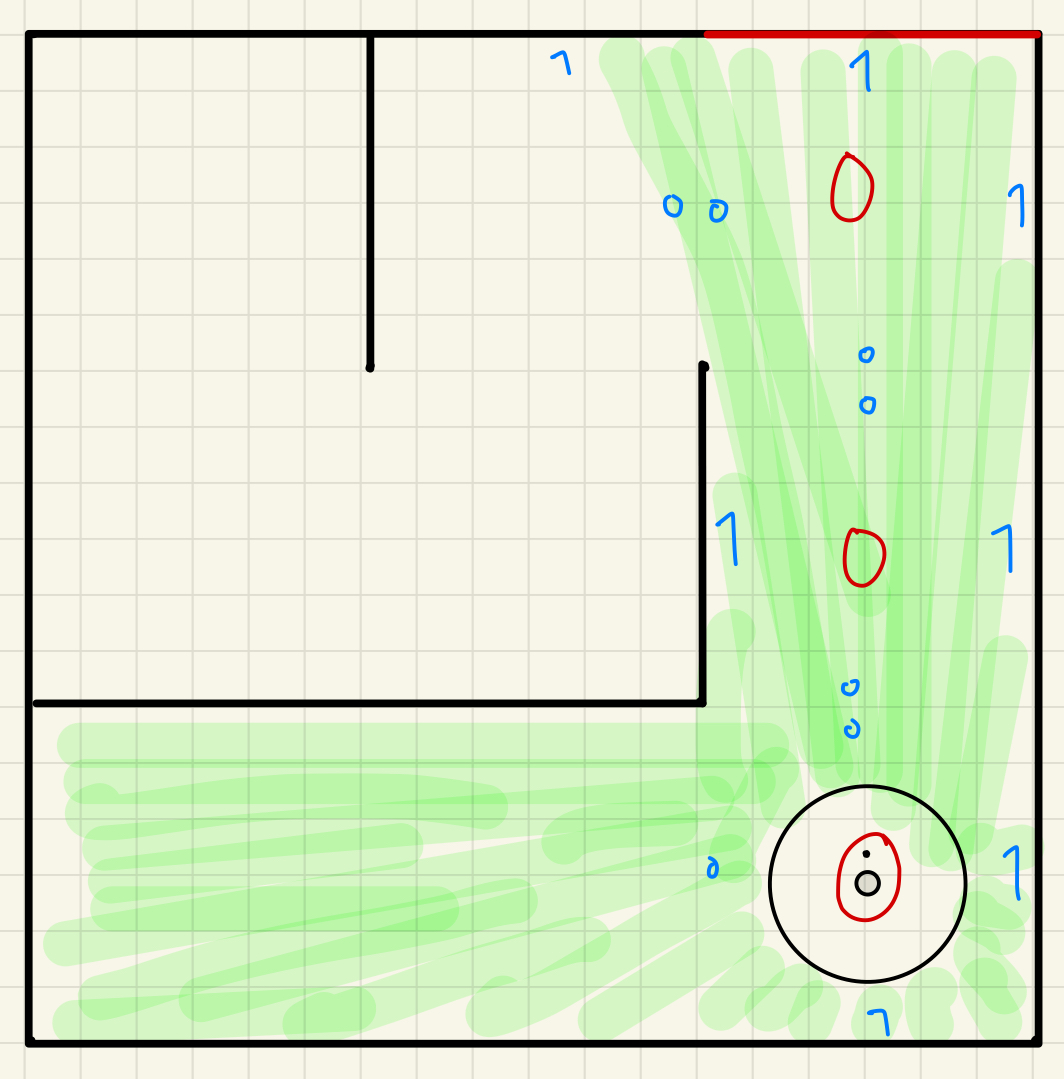
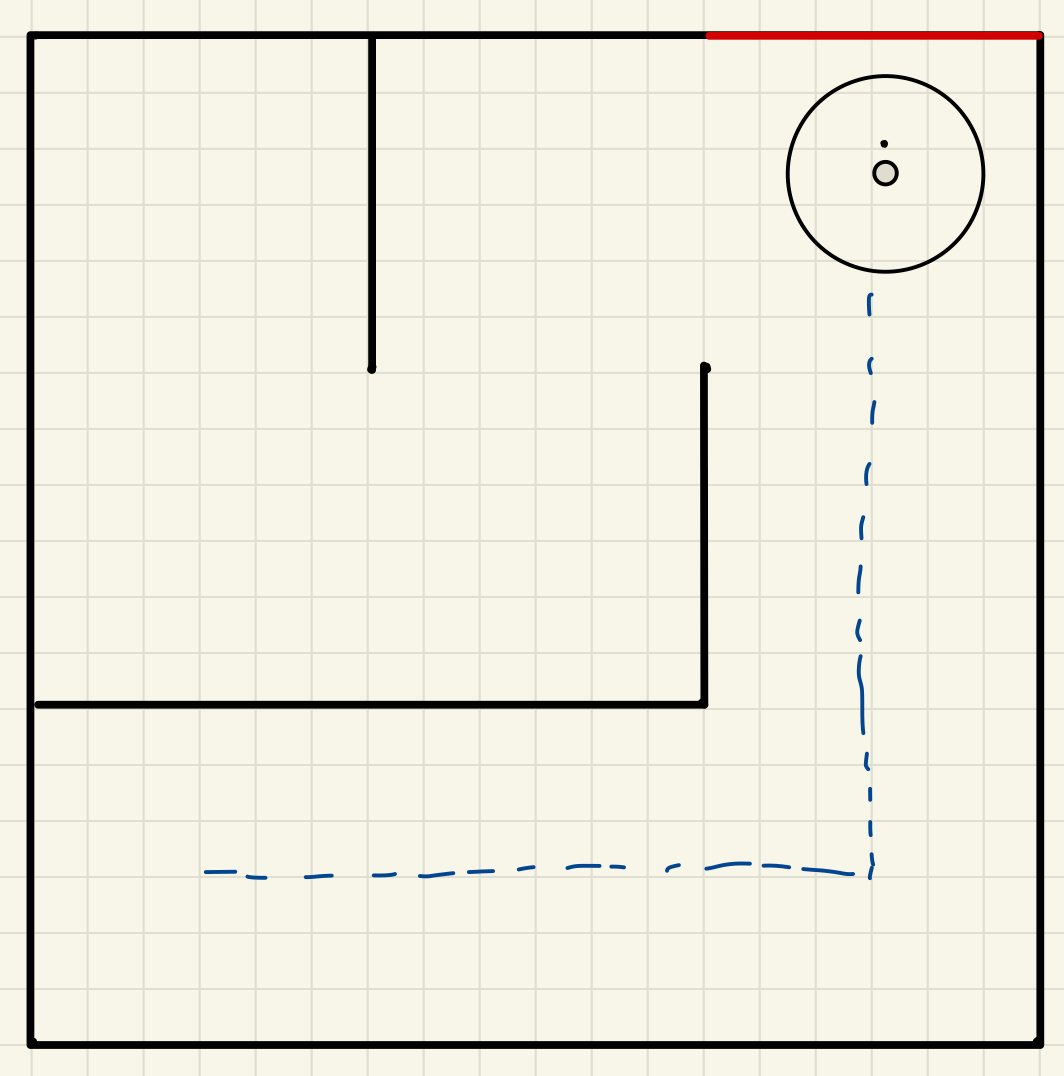
Figure 5: initial position (left), identifying blocked paths in the grid (center), and final trajectory (right) in the 3 x 3 meters maze. 3. Pathfinding with A* AlgorithmThe A* search algorithm provided an optimal path to navigate from the starting position to the goal. The algorithm utilized a heuristic (Manhattan distance) to efficiently balance exploration and exploitation. The pathfinding process included:
Python snippet for A* pathfinding:
Figure 2: Visualization of A* search algorithm used to solve a maze. 3. Sequential Navigation and CorrectionAfter computing the optimal path, the robot executed each step sequentially. Periodic corrections, such as wall alignment, ensured that odometry drift did not compromise navigation accuracy. Key components included:
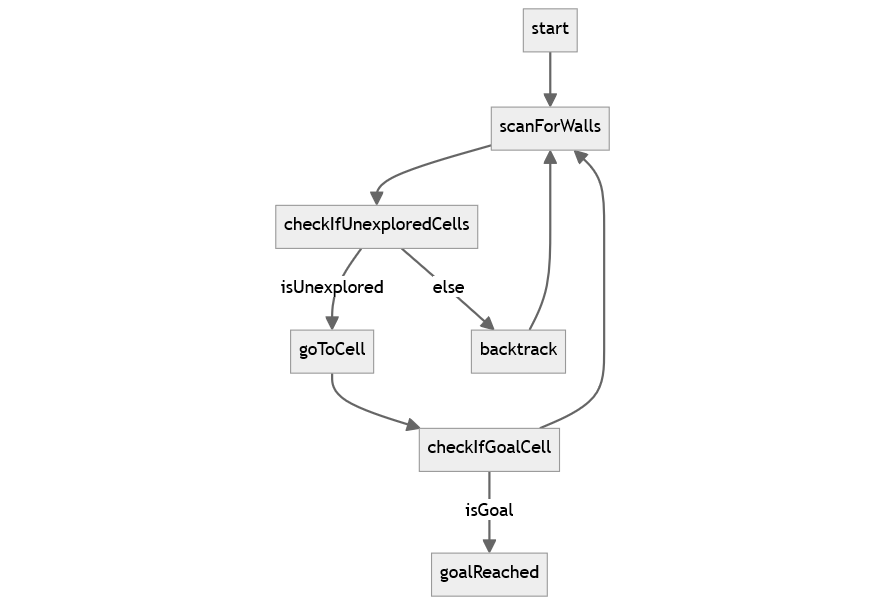
Figure 3: State machine for sequential navigation in a maze. |